找資料?
【組裝】GoARM 2024年式
前言
GoARMO 2024,是【GoSUMO金屬版】支援MG995機器手臂的衍生應用。2024年式全面提升、具有下列特點:
- 控制系統:dual2s / 3s / esp32
- 運動機構:平行機構 / 捕捉爪總成 / 彈性爪 / 推擋總成
- 電路保護:快接線束 / 電子線防呆接口 / 電機堵轉過電流保護
- 無線遙控:PS2搖桿 / APP藍牙 / ESPNOW / WIFI
- 韌體程式:Arduino C / microPython / yesioBlockly積木程式
組裝程序:
GoARM2024組裝程序,共分6個步驟(Step 01 – 06)。由於下述組裝解說影片包含了實作知識與運動機構注意事項,是以影片稍長些。對於實作知識豐富的朋友們,GoARM的實際的組裝時間是更短的。
提醒一:使用伺服電機(MG995/SG90…)於運動機構之中,都需要機械運動角的基礎觀念。此方面不熟悉的朋友們,請多留意下列影片與段落:
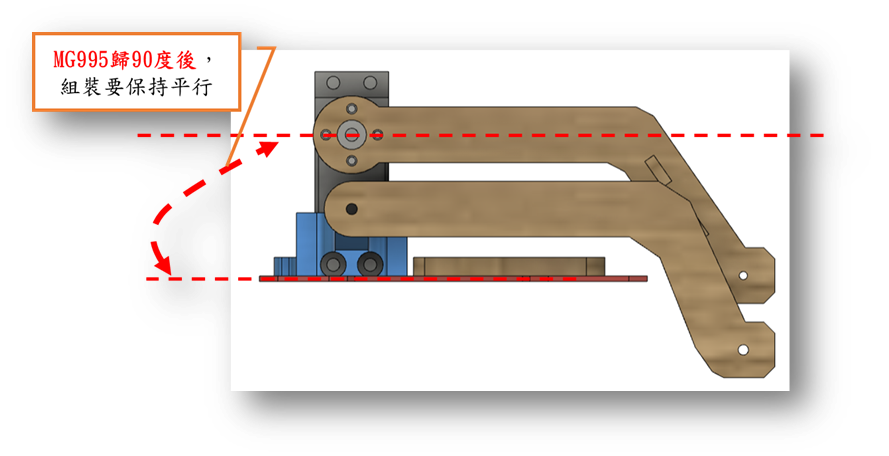
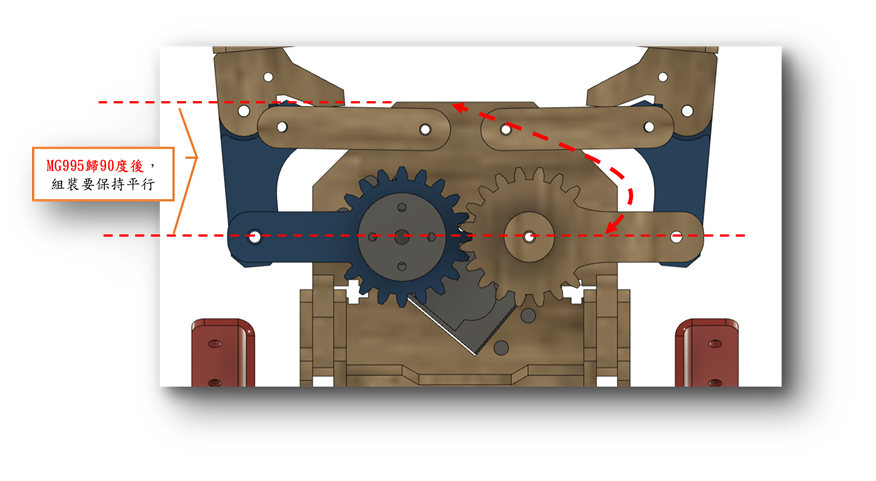
- 伺服電機歸位90度角:【Step 02. 機械原點 – MG995歸位90度】全段影片
- 機械原點位置:【Step 04. 捕捉爪總成】13:50秒起、【Step 05. 機械臂總成】13:10秒起。
提醒二:GoARM出廠時已經燒錄GoARM專用程式,可直接進入下述組裝程序。若您更動過dual控制器的韌體,再請自行燒錄,爾後組裝。
Are you ready! 我們開始組裝GoARM並認識其中的基礎實作知識囉~~ Let’s go ~
Step 01. 材料清點與工具說明
Step02. 機械原點 – MG995歸位90度
Step03. 彈性爪
Step04. 捕捉爪總成
Step05. 機械臂總成