
How can we help you today?
【致動】輪系移動 – 抓地胎
簡介
如何控制GoSUMO / GoARM移動方向呢? 本文章針對【抓地胎】提供說明。
GoSUMO / GoARM機器人系列使用在對戰式、抓地力較高的競技場合時,我們使用有較佳抓地力的橡膠胎。另外,輪系運動電機方面有N20 – 200RPM / 300RPM兩種選擇。為方便區別,我們以紅黑線標記200RPM;白黑線標記300RPM電機。如下圖所示。

當然,GoSUMO/GoARM也支援全向輪-麥克納姆輪的運動型式,全向輪具有10種運動模式,相關技術文章請參考【文章待補】。為避免冗長,本文章重點將放在抓地胎四輪驅動的控制說明:
- 如何使用函數庫與公版韌體程式控制GoSUMO/GoARM的車體運動方向。
- 如何使用公版APP程式,透過藍牙通訊控制車體運動方向
車體運動模式快速認識
目前公版韌體程式範例,在抓地胎運動方面提供4種基礎運動狀態,分別是車體的【前進、後退、左旋轉、右旋轉】,當然也可以調整輪胎的轉動速度(PWM調速)。我們用GoARM綜合運動展示,說明基礎的運動模式。如下影片介紹。
函數庫
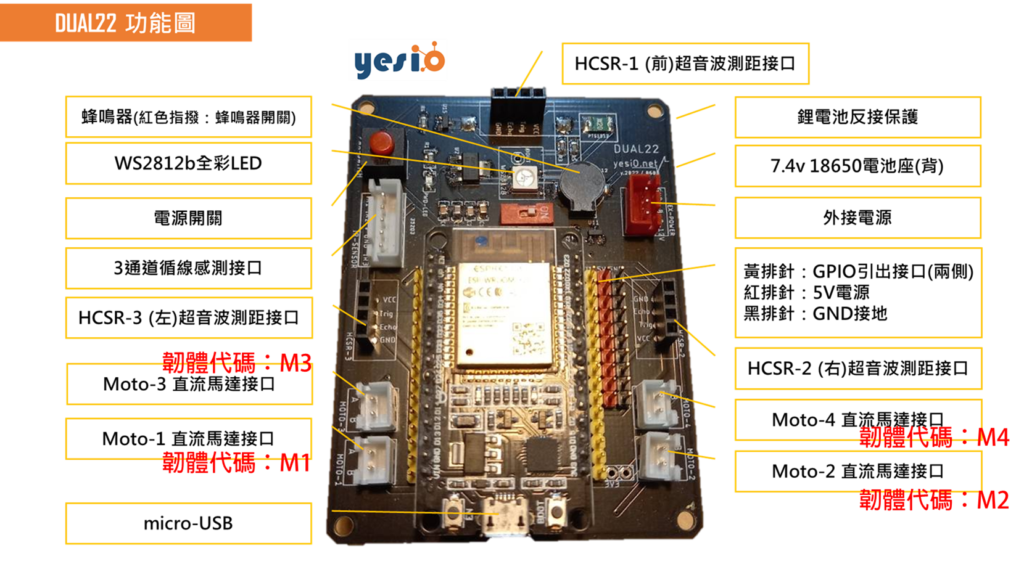
本文使用【DUAL22】範例函數庫:
- include <DUAL22.h>
- 車體運動巨集函數
- 函數:GS_FW(PWMspeed); //車體前進
- 函數:GS_BW(PWMspeed); //車體後退
- 函數:GS_LEFT(PWMspeed); //車體左旋轉
- 函數:GS_RIGH(PWMspeed); //車體右旋轉
- 說明:PWMSpeed : 數值 0 ~ 1023, 數值越大、轉速越快。
- 單通道電機PWM與正反轉控制
- 函數:mPWM(int Mx, int Dir, int PWMSpeed);
- 說明:Dir :(1) mCW : 順時針 (2) mCCW : 逆時針 (3) mSTOP : 停止
- 說明:PWMSpeed : 數值 0 ~ 1023, 數值越大、轉速越快。
- 說明:Mx馬達接口,M1、M2、M3、M4
- 車體運動巨集函數
韌體範例說明
想要了解更細部的單顆電機與基礎的控制說明,請參照【直流電機PWM正反轉基礎】一文。
本文站在快速應用角度,我們直接使用前述函數庫進行範例說明。拍謝,打字好累~ 😝 我們直接看影片吧~