
How can we help you today?
【運動】P2x搖桿(速配式) | dual2s (2025)
簡介
GoX系列機器人(GoSUMO、GoARM、GoJoga足球….)的核心控制器為dual2s。我們提供的程式範例中,控制GoX系列機器人的通訊模式主要有三種:【APP控制模式、PS2x控制模式(速配式)、PS3x控制模式(鎖址式)】,如圖所示。
👉本單元將針對【P2x搖桿模式(鎖址式)】提供程式範例。


檔案下載
P2x搖桿函數庫下載:載點。
GoX輪型運動基礎概念
本單元程式範例提供兩組運動模式:抓地胎、麥克納姆輪。抓地胎共4種運動模式、麥克納姆輪共有10種運動模式。如下圖表。

P2x搖桿 按鍵功能介紹

範例程式一、抓地胎
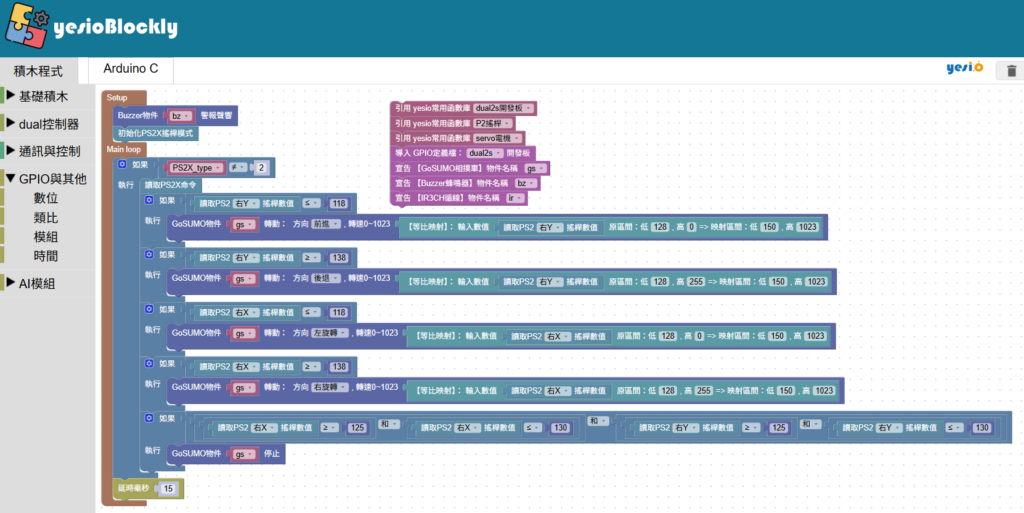
GoX在【抓地胎】模式時,目前有4種運動方向:前進、後退、左旋轉、右旋轉。運動速度由【搖桿推值】決定。
yesioBlockly積木程式範例
本範例下載傳送門,👉【XML檔案】。
Arduino C 程式範例
#include <dual2s.h>
#include <PS2X_lib.h>
#include <Servo.h>
//DC電機GPIO
#define PIN_MOTO_1A 14
#define PIN_MOTO_1B 32
#define PIN_MOTO_2A 12
#define PIN_MOTO_2B 33
#define PIN_MOTO_3A 25
#define PIN_MOTO_3B 26
#define PIN_MOTO_4A 23
#define PIN_MOTO_4B 22
//蜂鳴器GPIO
#define PIN_BUZZER 15
//超音波GPIO
#define PIN_USC_FRONT_ECHO 13
#define PIN_USC_FRONT_TRIG 27
#define PIN_USC_RIGHT_ECHO 5
#define PIN_USC_RIGHT_TRIG 4
#define PIN_USC_LEFT_ECHO 19
#define PIN_USC_LEFT_TRIG 18
//短距紅外線GPIO
#define PIN_IR_LEFT 34
#define PIN_IR_MIDDLE 35
#define PIN_IR_RIGHT 39
//供電偵測GPIO
#define PIN_BATTERY 36
//預設使用的PWM通道
#define PWM_CH_BUZZER 7
#define PWM_CH_M1A 8
#define PWM_CH_M1B 9
#define PWM_CH_M2A 10
#define PWM_CH_M2B 11
#define PWM_CH_M3A 12
#define PWM_CH_M3B 13
#define PWM_CH_M4A 14
#define PWM_CH_M4B 15
GoSUMO gs;
Buzzer bz(PIN_BUZZER, PWM_CH_BUZZER);
IR3CH ir(PIN_IR_LEFT, PIN_IR_MIDDLE, PIN_IR_RIGHT);
#define PS2_DAT 4
#define PS2_CMD 17
#define PS2_SEL 16
#define PS2_CLK 21
#define pressures false
#define rumble false
PS2X ps2x;
int error = -1;
byte PS2X_type = 0;
byte vibrate = 0;
int tryNum = 1;
void PS2X_INIT(){
while (error != 0) {
delay(1000);
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
Serial.print("#try config "); Serial.println(tryNum); tryNum ++;
}
Serial.println(ps2x.Analog(1), HEX);
PS2X_type = ps2x.readType();
switch(PS2X_type) {
case 0: Serial.printf("Unknown Controller type found, type is %d", PS2X_type); break;
case 1: Serial.printf("DualShock Controller found, type is %d", PS2X_type); break;
case 2: Serial.printf("GuitarHero Controller found, type is %d", PS2X_type); break;
case 3: Serial.printf("Wireless Sony DualShock Controller found, type is %d", PS2X_type); break;
}
}
void setup()
{
PS2X_INIT(); //注意,此將占用DUAL右側超音波
bz.alarm();
}
void loop()
{
if (PS2X_type != 2) {
ps2x.read_gamepad(false, vibrate);
if (ps2x.Analog(PSS_RY) <= 118) {
gs.act(GoSUMO::FORWARD, map(ps2x.Analog(PSS_RY),128,0,150,1023));
}
if (ps2x.Analog(PSS_RY) >= 138) {
gs.act(GoSUMO::BACKWARD, map(ps2x.Analog(PSS_RY),128,255,150,1023));
}
if (ps2x.Analog(PSS_RX) <= 118) {
gs.act(GoSUMO::GO_LEFT, map(ps2x.Analog(PSS_RX),128,0,150,1023));
}
if (ps2x.Analog(PSS_RX) >= 138) {
gs.act(GoSUMO::GO_RIGHT, map(ps2x.Analog(PSS_RX),128,255,150,1023));
}
if (ps2x.Analog(PSS_RX) >= 125 && ps2x.Analog(PSS_RX) <= 130 && ps2x.Analog(PSS_RY) >= 125 && ps2x.Analog(PSS_RY) <= 130) {
gs.stop();
}
}
delay(15);
}