
How can we help you today?
【感測】HCSR04超音波 | DUAL22-2s
簡介
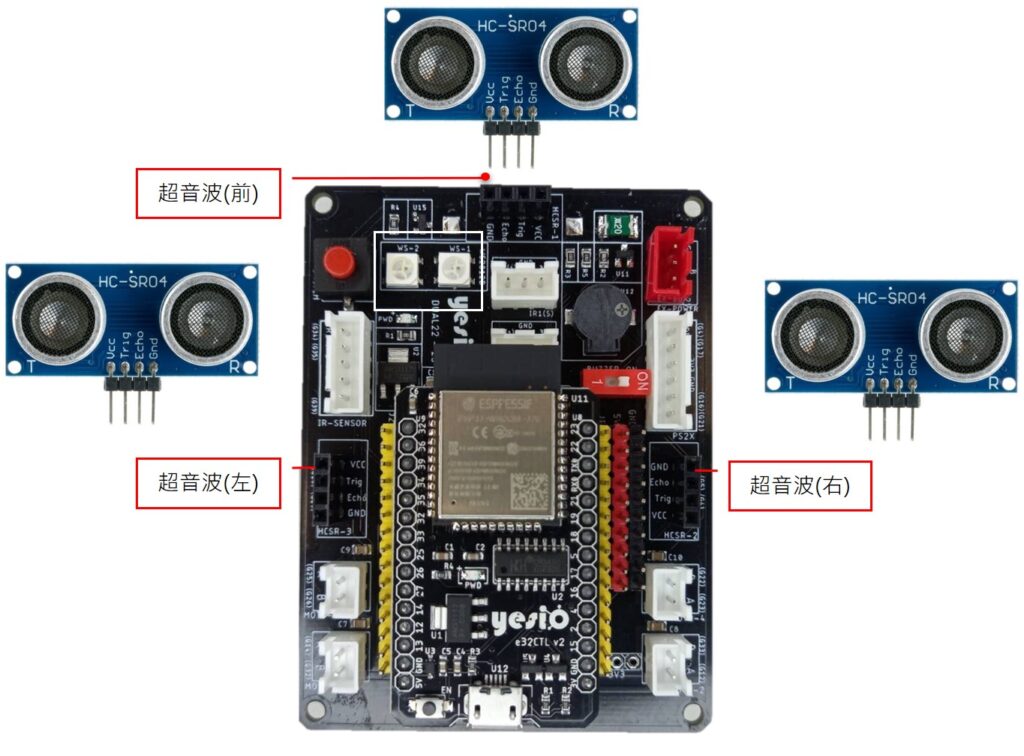
超音波是一項經常使用的距離偵測方式。DUAL22-2s開發板有三組超音波的接口位置,分別對應前、左、右,三個方向。我們提供快速應用的函數庫。
準備
材料與工具
本文範例使用【DUAL22-2s開發板】為示範。另外可準備支持3.3V供電之HCSR04超音波模組,3組。DUAL22-2s開發板採用4P母排接口,請留意接口電氣定義與順序,以及避免發生插拔時錯位等錯誤操作。
GPIO與電路
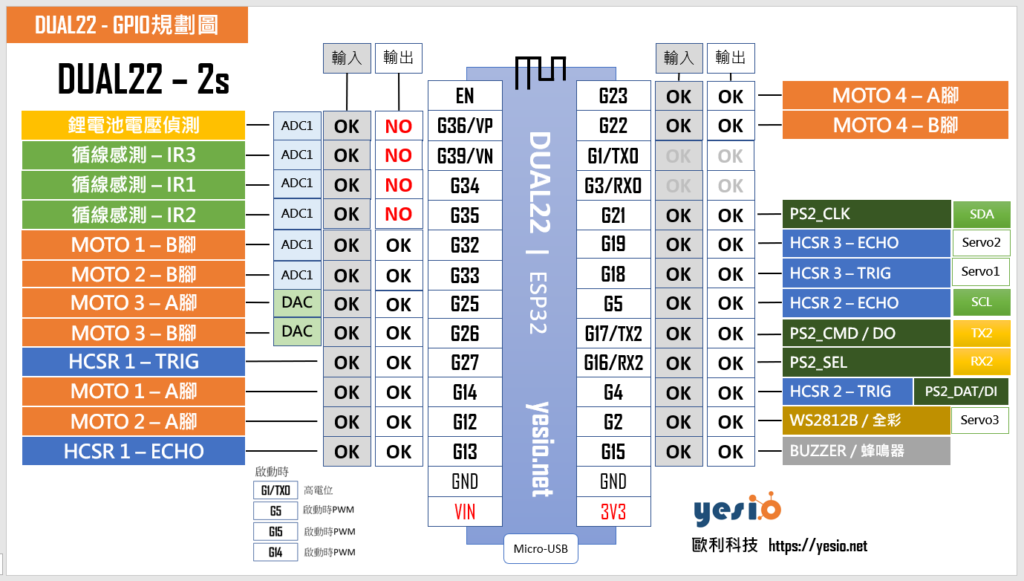
DUAL22-2s開發板可以處理3組HCSR04超音波模組,每組TRIG、ECHO之對應GPIO腳位號碼,如下表與圖所示。

函數與補充
我們依據DUAL22-2s的電路規劃特性,提供專用的函數庫以方便【快速應用與學習】的用途。當然,你也可以選擇不使用此函數庫,一樣可以完整地控制DUAL22-2s硬體功能。我們的函數庫完全開放、使用簡明的C/C++語法撰寫,你也可以據此修改更加適合你使用需求的函數庫。
函數使用方式,請參照本文、韌體範例。
| 函數庫 | 控制元件 | 內建數 | 類別 | 方法 |
|---|---|---|---|---|
| dual2s.h | HCSR04超音波 | 3 | HCSR04 | + bool HCSR04::ObjSeeking(thresh); + float HCSR04::ObjDistance(); + unsigned long HCSR04::probing(); + typedef enum{ USC_FRONT, USC_LEFT, USC_RIGHT} USC_DIR; |
韌體範例
Arduino C語言
【dual2s函數庫是小幫手,功用在快速上手】
dual2s函數庫開放,有需要者,你可以修改成所需的功能。
- 行數 4-26:DUAL22-2s開發板GPIO腳位定義。依據需求開啟相對腳位即可。
- 行數30-38:PWM通道使用定義。
#include <dual2s.h>
//DC電機GPIO
#define PIN_MOTO_1A 14
#define PIN_MOTO_1B 32
#define PIN_MOTO_2A 12
#define PIN_MOTO_2B 33
#define PIN_MOTO_3A 25
#define PIN_MOTO_3B 26
#define PIN_MOTO_4A 23
#define PIN_MOTO_4B 22
//蜂鳴器GPIO
#define PIN_BUZZER 15
//超音波GPIO
#define PIN_USC_FRONT_ECHO 13
#define PIN_USC_FRONT_TRIG 27
#define PIN_USC_RIGHT_ECHO 5
#define PIN_USC_RIGHT_TRIG 4
#define PIN_USC_LEFT_ECHO 19
#define PIN_USC_LEFT_TRIG 18
//短距紅外線GPIO
#define PIN_IR_LEFT 34
#define PIN_IR_MIDDLE 35
#define PIN_IR_RIGHT 39
//供電偵測GPIO
#define PIN_BATTERY 36
//esp32 has 16 PWM channel
//Reserve 0-6 Channel for Servo, LED ...
#define PWM_CH_BUZZER 7
#define PWM_CH_M1A 8
#define PWM_CH_M1B 9
#define PWM_CH_M2A 10
#define PWM_CH_M2B 11
#define PWM_CH_M3A 12
#define PWM_CH_M3B 13
#define PWM_CH_M4A 14
#define PWM_CH_M4B 15
//取得HCSR04物件
HCSR04 us_F(PIN_USC_FRONT_ECHO, PIN_USC_FRONT_TRIG); //前側
HCSR04 us_R(PIN_USC_RIGHT_ECHO, PIN_USC_RIGHT_TRIG); //右側
HCSR04 us_L(PIN_USC_LEFT_ECHO, PIN_USC_LEFT_TRIG); //左側
void setup() {
Serial.begin(115200);
}
void loop() {
//回傳前、右、左,三方向感測的距離結果,單位公分。
Serial.print(us_F.ObjDistance());
Serial.print(", ");
Serial.print(us_R.ObjDistance());
Serial.print(", ");
Serial.println(us_L.ObjDistance());
delay(10);
//回傳前、右、左,三方向感測的距離結果,單位公分。
int _distance = 20; //設定物體是否進入偵測範圍,單位公分。
Serial.print(us_F.ObjSeeking(_distance));
Serial.print(", ");
Serial.print(us_R.ObjSeeking(_distance));
Serial.print(", ");
Serial.println(us_L.ObjSeeking(_distance));
Serial.println("-------");
delay(1000);
}
yesioBlockly積木語言
