
How can we help you today?
【通訊】e32DUAL | GS/GA搖桿模式
簡介
機器人的控制領域中,指導器(TEACH-BOX)是一種常見且重要的裝置,扮演著人機介面中的關鍵環節。在程式學習階段,我們能導入並建立【指導器(TEACH-BOX)】的應用思維與素養嗎?
我想這答案是肯定的。雖然,高階複雜功能的機器人,TEACH-BOX難免功能繁複,一個TEACH-BOX程式開發也非簡單容易上手的事情。但是,由練習通訊、命令定義、程式演算法…的學習角度觀之,導入TEACH-BOX的學習觀念與基礎知識技能,並不是難事,也有其必要性。不管是介面直覺簡單,或是指令導向的TEACH-BOX,其中可程式化的研發、演算法設計過程,是不可少的。
例如,在我們e32DUAL專題中APP應用程式已經是建立最基礎簡單的TEACH-BOX基礎觀念了。未來功夫越深,韌體與APP程式能力越好,自然可設計出多元、深度的TEACH-BOX控制器功能。除了APP之外,我們也可以使用常見的PS2搖桿(arduino用),進行韌體程式的練習。這也是這篇單元的重點囉。
接線圖
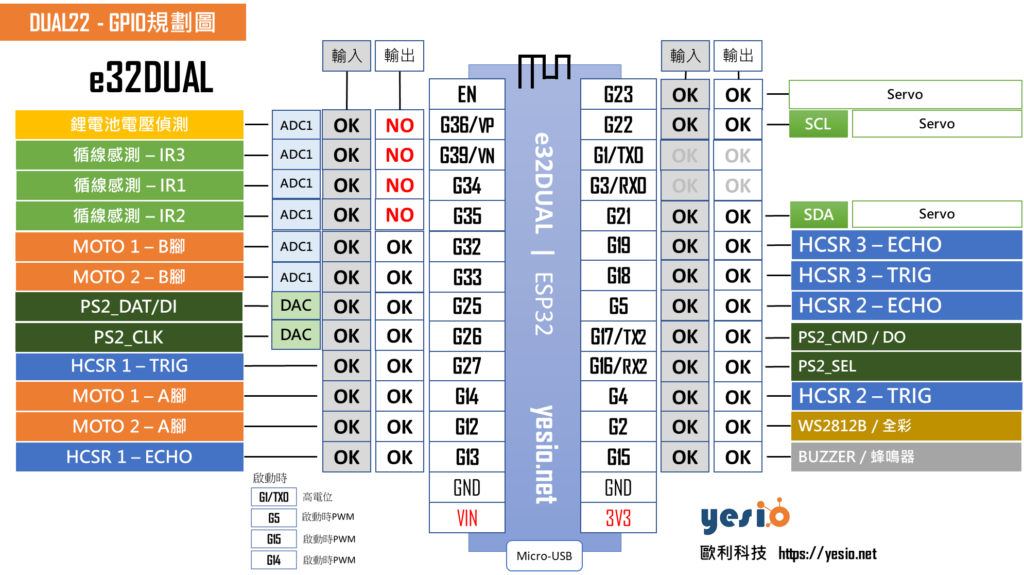
PS2搖桿接腳
| 腳位數 | PS2搖桿腳位/名稱 | e32DUAL腳位/GPIO |
| 1 | DAT / DI | 25 |
| 2 | CMD / DO | 17 |
| 3 | VCC | 5V |
| 4 | GND | GND |
| 5 | SEL | 16 |
| 6 | CLK | 26 |
範例程式
/*-- 註解區
> GoARM - PS2 | ESP32 | e32DUAL專題範例程式
--*/
/*-- 標頭檔區(程式庫) --*/
#include <e32DUAL.h>
#include <Servo.h>
#include <PS2X_lib.h>
/*-- 宣告區(全域變數) --*/
int SeekCnt = 0;
unsigned long prevMillis = 0; // 暫存經過時間(毫秒)
const long interval = 5000; // 指定間隔時間5秒(5000毫秒)。
//Servo Motor 變數區 & 機械臂微調區 -------
//重要,詳見影片介紹:https://youtu.be/PnZQBKgZXok
Servo servoBase;
Servo servoPaw;
int homeBase = 90; //機械臂原點角度。
int homePaw = 90; //機械爪原點角度。
int posBase = homeBase;
int posBaseMAX = 170; //機械臂最大抬升角度。
int posBaseMIN = 90; //機械臂最小降低角度。
int posPaw = homePaw;
int posPawMAX = 98; //機械爪最大開啟角度。
int posPawMIN = 60; //機械爪最小閉合角度。
//PS2X Pins & Setting-----------------
#define PS2_DAT 25 //input pin, DI - 25
#define PS2_CMD 17 //output pin, DO - 17/TX2
#define PS2_SEL 16 //output pin, SEL- 16/RX2
#define PS2_CLK 26 //output pin, CLK- 26
#define pressures false
#define rumble false
PS2X ps2x; // create PS2 Controller Class
int error = -1;
byte PS2X_type = 0;
byte vibrate = 0;
int tryNum = 1;
int PWMSpeed_MAX = 1023; //DC電機最大PWM值(速度)
int PWMSpeed_MIN = 150; //DC電機最小PWM值(速度)
//-----------------
/*-- 初始化區 --*/
void setup()
{
GoSUMOInital(); //進行GoSUMO機器人初始化, Serial baud rate = 115200
Serial.begin(115200);
//初始化PS2搖桿
PS2X_INIT();
//ServoMotor初始化
servoBase.attach(23);
servoPaw.attach(22);
ServoARM("Home", "");
}
/*-- 主程式區(重複執行) --*/
void loop()
{
if(PS2X_type != 2){
ps2x.read_gamepad(false, vibrate); //讀取PS2命令
//Serial.println(ps2x.Analog(PSS_RY));
//Serial.println(ps2x.Analog(PSS_RX));
if(ps2x.Analog(PSS_RY) <= 118){ GS_FW(map(ps2x.Analog(PSS_RY), 128, 0, PWMSpeed_MIN, PWMSpeed_MAX)); Serial.println("F"); } //前進
if(ps2x.Analog(PSS_RY) >= 138){ GS_BW(map(ps2x.Analog(PSS_RY), 128, 255, PWMSpeed_MIN, PWMSpeed_MAX)); } //後退
if(ps2x.Analog(PSS_RX) <= 118){ GS_LEFT(map(ps2x.Analog(PSS_RX), 128, 0, PWMSpeed_MIN, PWMSpeed_MAX-200)); } //左旋轉
if(ps2x.Analog(PSS_RX) >= 138){ GS_RIGHT(map(ps2x.Analog(PSS_RX), 128, 255, PWMSpeed_MIN, PWMSpeed_MAX-200)); }//右旋轉
if(
((ps2x.Analog(PSS_RX) < 130)&&(ps2x.Analog(PSS_RX) > 125))
&&
((ps2x.Analog(PSS_RY) < 130)&&(ps2x.Analog(PSS_RY) > 125))
){ GS_STOP(); }
if(ps2x.Analog(PSS_LX) <= 118){ ServoARM("Paw", "OPEN"); }
if(ps2x.Analog(PSS_LX) >= 138){ ServoARM("Paw", "CLOSE"); }
if(ps2x.Analog(PSS_LY) <= 118){ ServoARM("Base", "DOWN"); }
if(ps2x.Analog(PSS_LY) >= 138){ ServoARM("Base", "UP"); }
if(ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { ServoARM("Home", ""); } //Servo復位90度
if(ps2x.Button(PSB_L2) || ps2x.Button(PSB_R2)) { prevMillis = millis(); SpecificAction(); } //進入指定動作模式
}
delay(15);
} //END OF LOOP
/*====== 副程式區,start here. ========*/
void SpecificAction(){ //指定動作程式區
int _SPEED = 1000; //速度設定1000
GS_FW(_SPEED); delay(3000); //前進3秒
GS_LEFT(_SPEED); delay(300); //左旋0.3秒
GS_FW(_SPEED); delay(1000); //前進1秒
GS_RIGHT(_SPEED); delay(300); //右璇0.3秒
GS_FW(_SPEED); delay(1000); //前進1秒
GS_STOP();
}
void ServoARM(String _ACTION, String _DIR){
if(_ACTION == "Base"){
if((_DIR == "UP")&&(posBase < posBaseMAX )){servoBase.write(++posBase); }
if((_DIR == "DOWN")&&(posBase > posBaseMIN )){servoBase.write(--posBase); }
}
if(_ACTION == "Paw"){
if((_DIR == "OPEN")&&(posPaw < posPawMAX )){servoPaw.write(++posPaw); }
if((_DIR == "CLOSE")&&(posPaw > posPawMIN )){servoPaw.write(--posPaw);}
}
if(_ACTION == "Home"){
Serial.println("servoHome");
servoBase.write(homeBase);
servoPaw.write(homePaw);
posPaw = homePaw;
posBase = homeBase;
delay(1000);
}
}
/*====================================
// PS2X 搖桿設定
=====================================*/
void PS2X_INIT(){
while (error != 0) {
delay(1000);// 1 second wait
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
Serial.print("#try config ");
Serial.println(tryNum);
tryNum ++;
}
Serial.println(ps2x.Analog(1), HEX);
PS2X_type = ps2x.readType();
switch(PS2X_type) {
case 0:
Serial.printf(" Unknown Controller type found, type is %d\n", PS2X_type);
break;
case 1:
Serial.printf(" DualShock Controller found, type is %d\n", PS2X_type);
break;
case 2:
Serial.printf(" GuitarHero Controller found, type is %d\n", PS2X_type);
break;
case 3:
Serial.printf(" Wireless Sony DualShock Controller found, type is %d\n", PS2X_type);
break;
}
}